Volver a Proyectos
Proyecto Completado
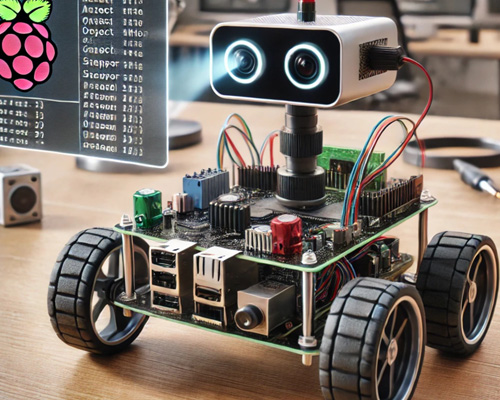
Objeto con IA
Una plataforma robótica autónoma equipada con visión por computadora en tiempo real y capacidades de aprendizaje profundo para reconocimiento e interacción inteligente de objetos.
6
Módulos de Cámara
15
Clases de Objetos
98%
Tasa de Detección
10
Semanas de Construcción

