Volver a Proyectos
Proyecto Completado
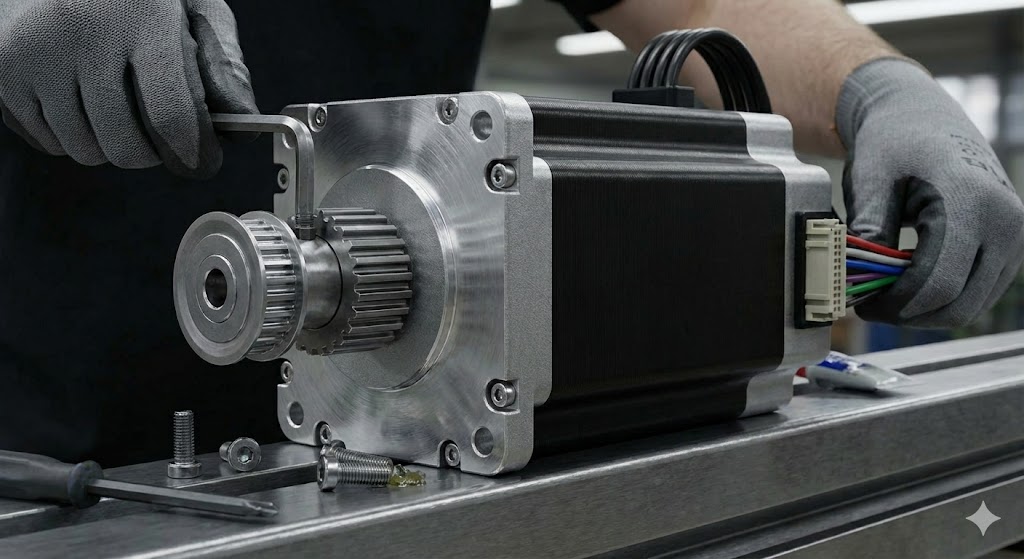
Motor Paso a Paso de Precisión
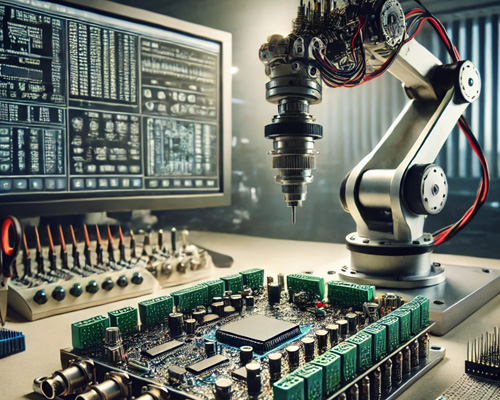
Un controlador de motor paso a paso multieje de alta precisión diseñado para aplicaciones de brazos robóticos, con microstepping, retroalimentación en lazo cerrado y planificación de trayectoria en tiempo real.
6
Ejes de Motor
256
Micropasos
0.01mm
Precisión
11
Semanas de Construcción