프로젝트로 돌아가기
완료된 프로젝트
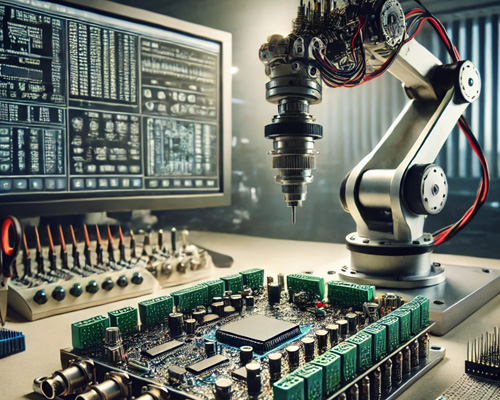
정밀 스테퍼
마이크로 스테핑, 폐쇄 루프 피드백 및 실시간 궤도 계획을 특징으로 하는 로봇 팔 애플리케이션용으로 설계된 고정밀 다축 스테퍼 모터 컨트롤러입니다.
6
모터 축
256
마이크로 스텝
0.01mm
정밀도
11
제작 소요 주
마이크로 스테핑, 폐쇄 루프 피드백 및 실시간 궤도 계획을 특징으로 하는 로봇 팔 애플리케이션용으로 설계된 고정밀 다축 스테퍼 모터 컨트롤러입니다.
조용하고 높은 토크 작동을 위한 StealthChop 및 SpreadCycle 기능이 있는 TMC2209 스테퍼 드라이버
인터럽트 기반 스텝 생성을 통해 실시간 모션 계획을 실행하는 STM32F4 MCU
폐쇄 루프 위치 검증 및 원점 복귀를 위한 광학 인코더 및 리미트 스위치
맞춤형 궤도 플래너 및 웹 기반 조그 제어 인터페이스가 있는 G-코드 인터프리터
모든 축에서 백래시 방지 보정을 통해 0.01mm의 위치 정확도를 달성하는 256 마이크로 스텝 해상도.
부드럽고 갑작스러운 움직임이 없는 로봇 동작을 위한 S 커브 가속 프로필을 적용한 조정된 6축 보간.
속도 스무딩을 통해 초당 최대 1000개의 모션 세그먼트를 처리하는 사전 예측 궤도 플래너.
StealthChop 드라이브 모드는 저속에서 전체 토크를 유지하면서 모터 소음을 거의 무음 수준으로 줄입니다.
광학 인코더 피드백은 누락된 스텝을 감지하고 작동을 멈추지 않고 위치 드리프트를 자동으로 수정합니다.
안전한 무인 작동을 위한 하드웨어 리미트 스위치, 소프트웨어 경계, 비상 정지 및 열 보호 기능.
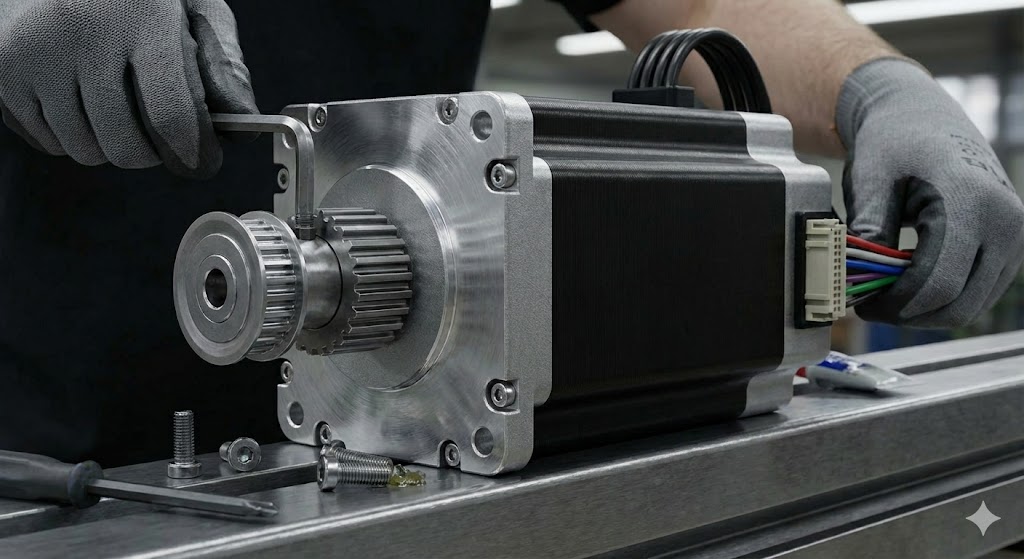

로봇 팔의 각 축에 대한 조인트 동작 범위 지정, 토크 계산 및 모터 선택.
전류 감지, 열 관리 및 EMI 차폐 기능이 있는 TMC2209 드라이버용 맞춤형 캐리어 보드.
실시간 스텝 생성, G-코드 구문 분석 및 폐쇄 루프 PID 위치 제어 기능이 있는 STM32 펌웨어.
충돌 감지 기능이 있는 데카르트에서 조인트 공간으로의 변환을 위한 순기구학 및 역기구학 솔버.
반복성 테스트, 부하 특성화 및 장기 내구성 실행을 통한 전체 시스템 검증.